
Publications
M. Jdeed, S. Zhevzhyk, F. Steinkellner, and W. Elmenreich. Spiderino-A low-cost robot for swarm research and educational purposes. In Proceedings of the 13th International Workshop on Intelligent Solutions in Embedded Systems (WISES’17), Hamburg, Germany, June 2017.
M. Jdeed, A. Pitman, and W. Elmenreich. Evolving Swarm Behavior for Simulated Spiderino Robots. ADAPTIVE 2019, The Eleventh International Conference on Adaptive and Self-Adaptive Systems and Applications, pages 21-26, Venice, Italy, May 2019.
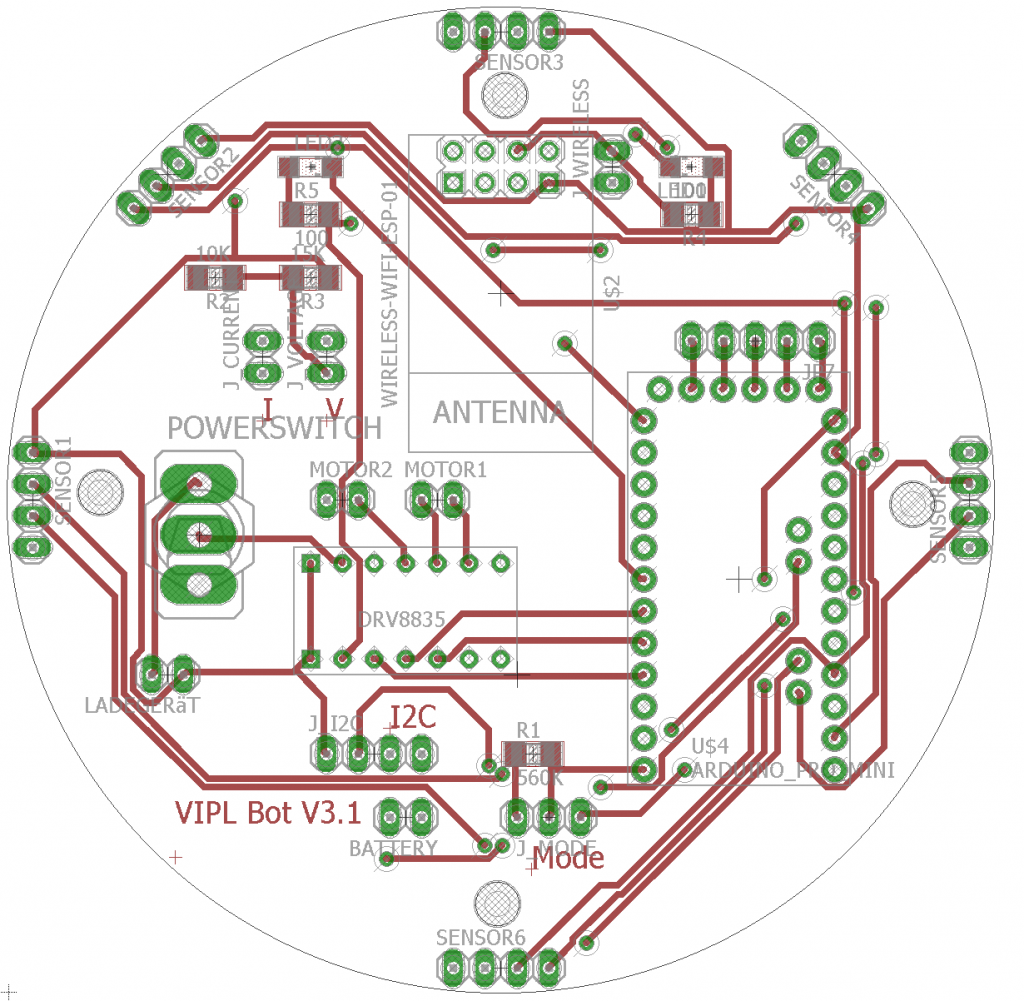
Spiderino Hardware
We used Eagle for hardware design of Spiderino. Please click HERE to download the latest versions of Spiderino’s main board, and the sensor board.
Spiderino 3D-Adapters
We mainly designed a 3d-adapter to be accommodated or attached to the printed circuit board, and a LiPo battery. Another one is designed also to accommodate the six sensors Spiderino has. Please click HERE to download the .stl files.

Programming Interface
Spiderino can be programmed via its Arduino Pro Mini. An API for controlling the robot’s hardware is described in the Spiderino documentation.